Instrução
Criar linhas de curva de nível a partir de dados Lidar
Descrição
Lidar (detecção e alcance de luz) é uma técnica de sensoriamento remoto óptico que usa luz laser para amostrar a superfície da Terra e produzir medições x, y, z altamente precisas. As linhas de curva de nível podem ser criadas a partir dos dados lidar (.las) para fornecer informações sobre a elevação da superfície da Terra. Cada feição de linha de curva de nível é criada conectando pontos contíguos com valores de altura iguais dos dados lidar.
As instruções fornecidas descrevem como criar linhas de curva de nível a partir de dados lidar.
Solução ou Solução Provisória
Crie um conjunto de dados LAS antes de criar linhas de curva de nível a partir dos dados lidar. Para obter instruções sobre como criar um conjunto de dados LAS, consulte o seguinte documento de ajuda da web, ArcMap: Criando um conjunto de dados LAS.
Note: Spatial reference must be defined for each LAS file. ArcGIS reads and uses this spatial reference information. Defining the spatial reference at the LAS dataset level alone is not enough. LAS data might not be displayed due to different projections between the map and the LAS data, or the spatial reference for the LAS files is not defined properly.
As linhas de curva de nível podem ser criadas a partir dos dados lidar usando uma das opções descritas.
Note: The first option requires the 3D Analyst extension, and the second option requires either the 3D Analyst extension or the Spatial Analyst extension.
Crie linhas de de curva de nível diretamente do conjunto de dados LAS.
- Adicione o conjunto de dados LAS no ArcMap.
- Abra a ferramenta Curva de Nível de Superfície. Vá até Ferramentas do 3D Analyst > Superfície triangulada > Curva de nível de superfície.
- Navegue pelo conjunto de dados LAS como a Superfície de Entrada.
- Defina um nome e local para a Classe de Feição de Saída.
- Defina o parâmetro Intervalo da curva de nível com o intervalo desejado entre as linhas de curva de nível.
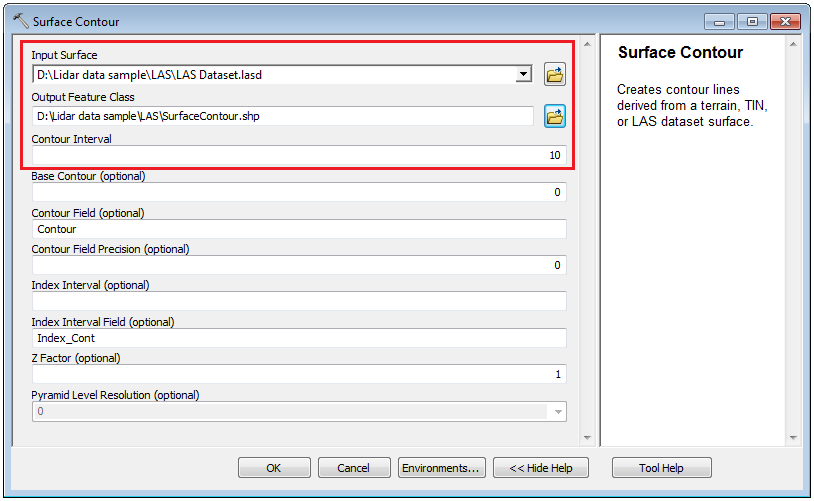
- Clique em OK. As linhas de curva de nível com o intervalo especificado são criadas no mapa.
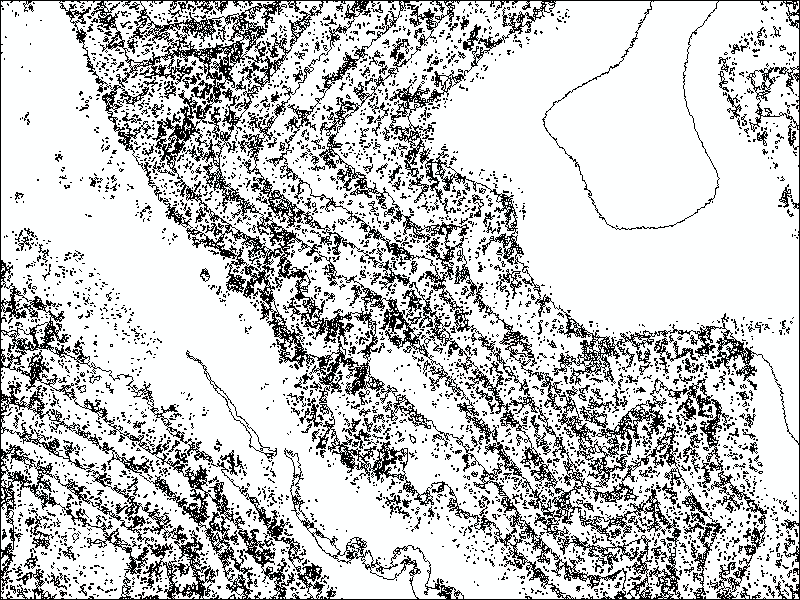
As curvas de nível criadas a partir de dados Lidar de resolução total tendem a ser irregulares com muitas voltas e reviravoltas e anéis fechados isolados devido ao ruído de alta frequência. Para obter mais informações sobre o ruído do Lidar e como obter curvas de nível menos irregulares, consulte a seguinte documentação: Minimizando o ruído dos dados lidar para análise de curvas de nível e declividade.
Crie linhas de curvas de nível a partir de um raster criado a partir do conjunto de dados LAS.
- Adicione o conjunto de dados LAS no ArcMap.
- Abra a ferramenta Conjunto de dados LAS para raster. Navegue até Ferramentas de conversão > Para Raster > Conjunto de dados LAS para Raster.
- Procure o conjunto de dados LAS como o Conjunto de dados LAS de entrada.
- Defina um nome para o Raster de Saída.
- Selecione Agrupamento para o Tipo de interpolação.
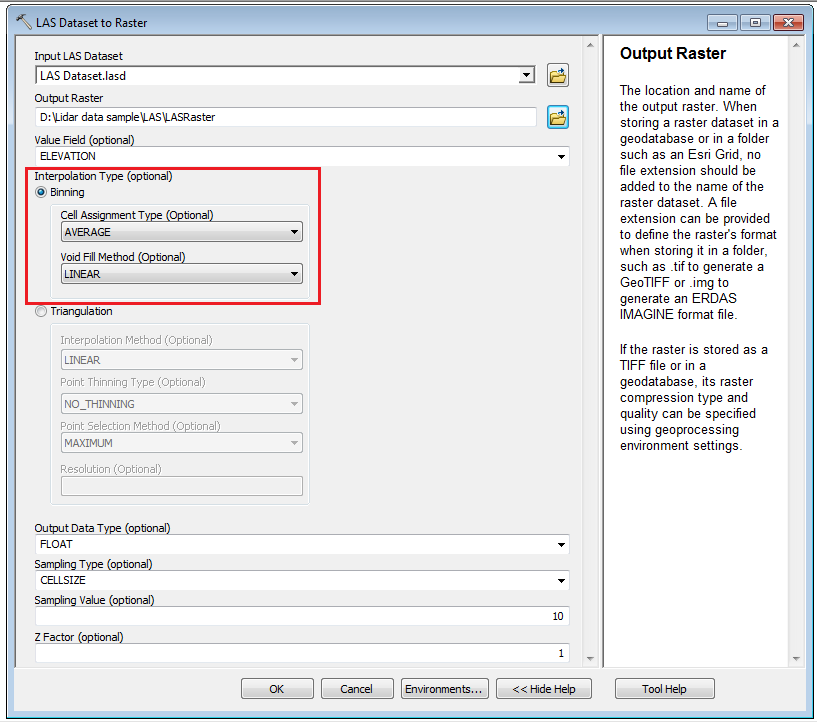
Note: Binning interpolation determines the value of a pixel by examining the points that fall within the pixel to determine the final value. Triangulation interpolation is recommended for low-density Lidar data where it uses Delaunay triangulation to create a surface from a network of triangular facets defined by nodes and edges covering the surface before rasterizing it.
- Clique em OK. Um raster é exibido no mapa.
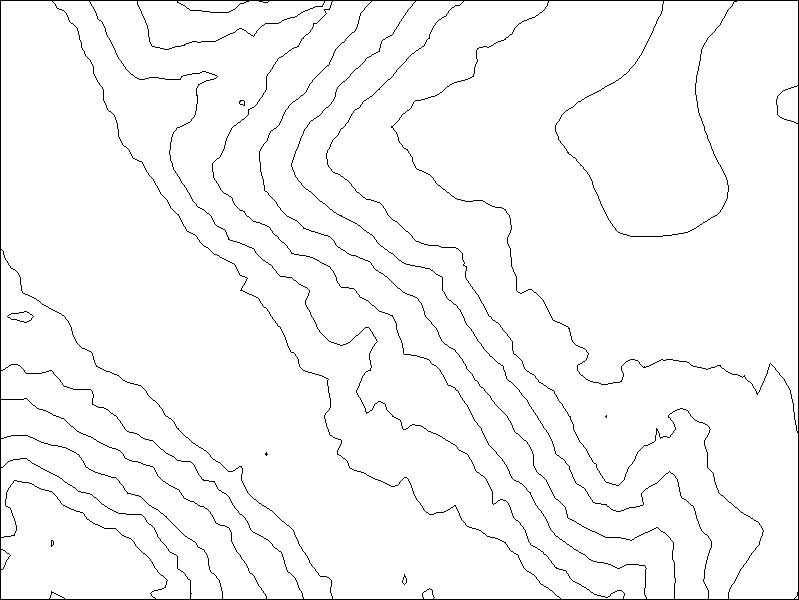
- Abra a ferramenta Curva de Nível. Navegue até Ferramentas do 3D Analyst > Superfície Raster> Curva de Nível ou se a extensão do 3D Analyst não estiver disponível, mas a extensão do Spatial Analyst estiver disponível, navegue até Spatial Analyst > Surface > Curva de Nível.
- Navegue pelo conjunto de dados raster como o Raster de entrada.
- Defina um nome e um local para os Feições de polilinha de saída.
- Defina o parâmetro Intervalo de curva de nível com o intervalo desejado entre as linhas de curva de nível.
- Clique em OK. As linhas de curva de nível com o intervalo especificado são exibidas no mapa.
Note: Every Lidar point can have a classification assigned to it, defining the type of object that has reflected the laser pulse including bare earth or ground, the top of a forest canopy, or water. For more information of the Lidar data classification, refer to the following documentation: Lidar point classification. For steps to filter the Lidar data, refer to the following documentation, ArcMap: Filter tab.
ID do Artigo: 000015264
Obtenha suporte com IA
Resolva seu problema rapidamente com o chatbot de IA de suporte da Esri.


Informações Relacionadas
Descubra mais sobre este tema
Search for related information
Find training related to this topic
Explore ideas and give feedback
Obtenha ajuda de especialistas do ArcGIS
Comece a conversar agora