CÓMO
Volar un dron con Terrain Follow con ArcGIS Flight
Resumen
En lugar de volar un dron a una altura constante, ArcGIS Flight permite vuelos autónomos a altitudes dinámicas siguiendo la topografía del sitio con la función Terrain Follow. En el caso de áreas topográficas alrededor de colinas y otras elevaciones de terreno variables, el seguimiento del terreno mejora la coherencia y la calidad de los productos de imágenes desde un vuelo de dron capturando imágenes con una resolución constante y una superposición adecuada. Terrain Follow se puede habilitar en todos los modos de vuelo, excepto en Inspección.
Caution: Terrain Follow is intended to be used by experienced pilots only. Terrain Follow flights introduce additional risk due to the variation in Flight Height during the mission. It is the sole responsibility of the pilot-in-command to ensure safe operation throughout the entirety of the mission, and assume manual control to avoid collisions if necessary.
Notas importantes sobre Terrain Follow
- Seguimiento de terreno requiere un mapa base sin conexión o una buena conexión a Internet en el campo. Se recomienda encarecidamente descargar un mapa base sin conexión si la conexión a Internet en el sitio de la misión no es fiable.
- El terreno se calcula a partir de los datos de ArcGIS Earth.
- La base de datos de terrenos contiene varias fuentes de datos y su resolución y grado de actualización varía en función del país. Por lo tanto, el terreno puede estar obsoleto o no tener la resolución requerida para representar entidades tales como picos, acantilados y otros accidentes del terreno.
- Obstáculos tales como árboles, edificios altos, torres de agua y líneas eléctricas no están representados en la base de datos de terreno y, por lo tanto, no se tienen en cuenta durante los cálculos de la altura de vuelo.
- Visualización del perfil solo muestra la elevación del suelo bajo la ruta de vuelo. Es posible que existan elevaciones más altas en el área de vuelo y entre el área de vuelo y la ubicación de despegue del dron. Esto se debe tener en cuenta al ajustar la altura de retorno mínima.
Procedimiento
Para llevar a cabo una misión usando Terrain Follow:
- Actualice ArcGIS Flight a la versión más reciente.
- Abra la aplicación en el iPad.
- Seleccione un proyecto existente o cree uno nuevo dentro de su organización.
- Elija el modo de vuelo deseado. Este tutorial utiliza Levantamiento topográfico de área.
- Proporcione un nombre para su misión.
- Escriba la dirección o la ciudad más cercana a la ubicación del vuelo. Utilice el mapa para acercarse a la zona de vuelo en cuestión.
- Seleccione Siguiente → en la esquina inferior izquierda para ir al menú Configuración de la misión.
- Arrastre los vértices (círculos blancos) del polígono de vuelo para cubrir su área de interés. Agregue vértices al polígono de vuelo tocando los círculos blancos más pequeños entre los vértices existentes.
- Si lo desea, utilice Definir área de misión desde polígono para especificar el polígono de vuelo con capas de su organización de ArcGIS Online o de superposiciones de proyectos de Site Scan.
- Habilite Terrain Follow. La ventana del mapa cambia a una vista 3D.
- En la esquina superior izquierda del mapa, toque el icono del gráfico para abrir la vista del perfil. Utilice la imagen de abajo para familiarizarse con los elementos de la vista de perfil.
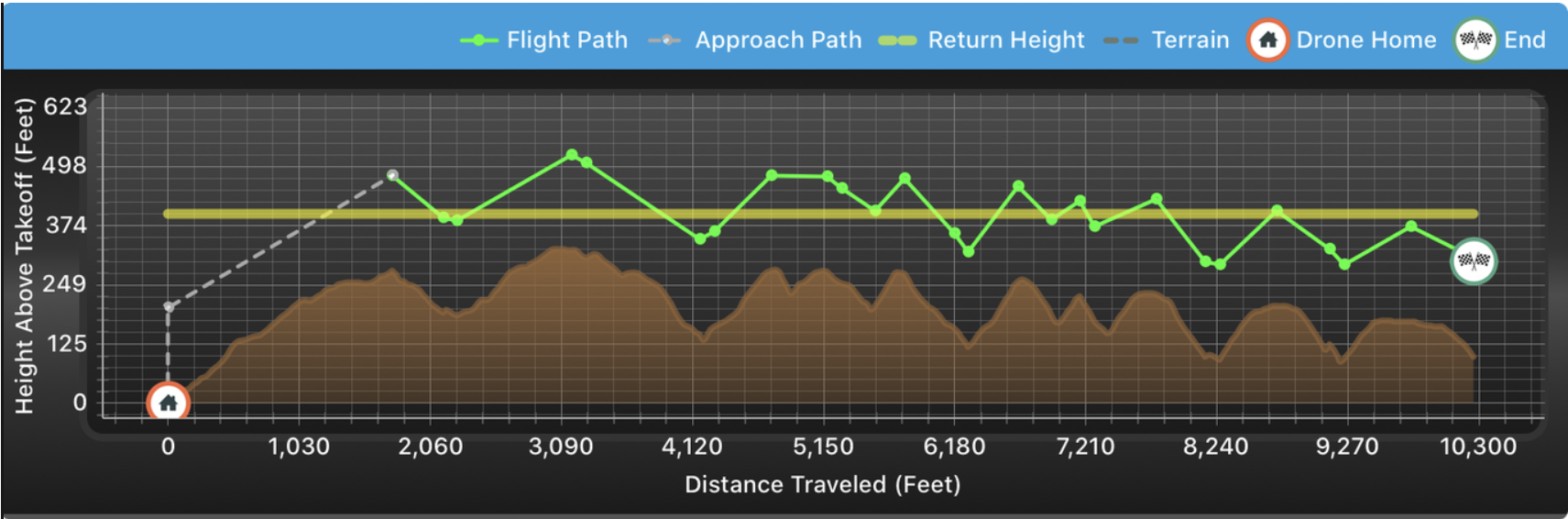
- El icono rojo Casa del dron es la ubicación de despegue del dron.
- El icono verde Final es la altura del dron en su punto de referencia final.
- El polígono marrón representa la altura del terreno directamente debajo del dron durante toda la misión.
- La línea verde es la altura del dron sobre el despegue durante la captura de datos.
- La línea discontinua gris es la altura del dron mientras viaja al primer punto de referencia.
- La línea amarilla es la altura del dron sobre el nivel de despegue durante la vuelta.
- Usando el mapa y la vista de perfil como guías, ajuste la configuración de vuelo dentro del menú Configuración de la misión según sea necesario.
- Si la vista del perfil muestra que la ruta de vuelo se acerca al terreno, considere aumentar la Altura de vuelo o reducir la Altura de tolerancia.
- El gráfico de la vista de perfil se actualiza después de cambiar la configuración de vuelo o ajustar los vértices del área de misión. Los vértices se pueden ajustar volviendo a la vista 2D.
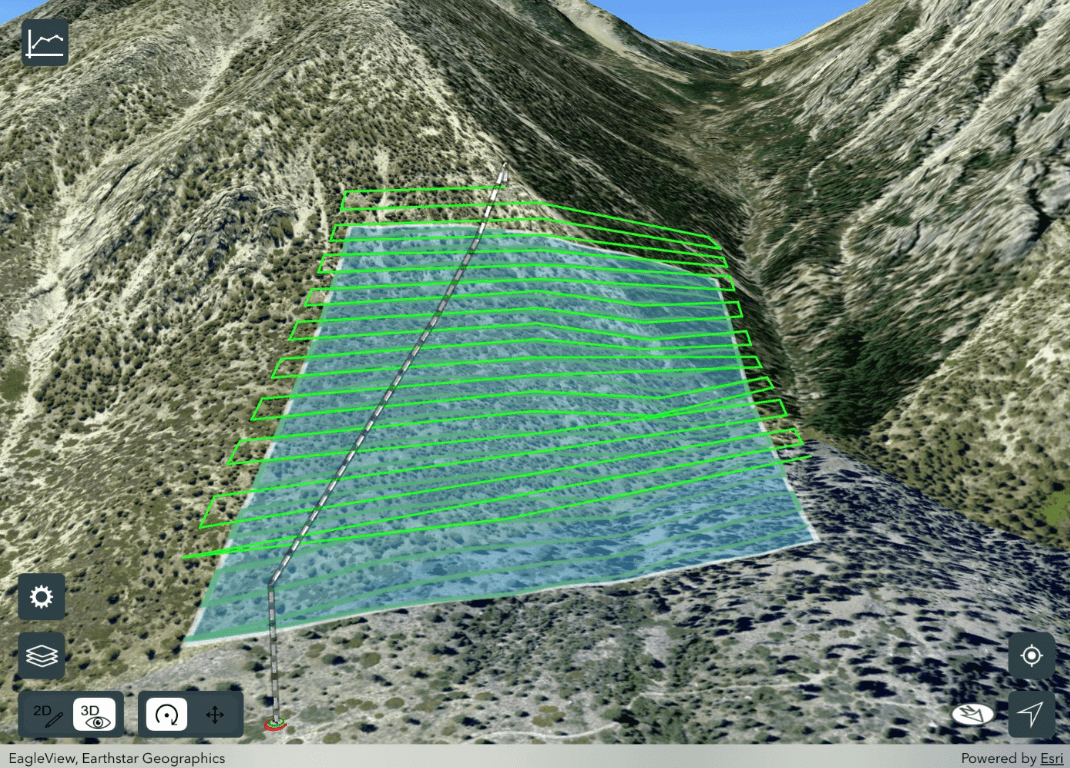
- Para optimizar la eficiencia, se recomienda fijar el ángulo de trama de línea en perpendicular a la pendiente, como en el ejemplo siguiente.
- Opcionalmente, habilite Barrera geográfica. Cuando está habilitada, se planifica una etapa de vuelta siguiendo el terreno y se carga en el dron antes del despegue. Al habilitar la opción Barrera geográfica, se reduce la cobertura de área por vuelo porque Volver a casa se activa antes para garantizar que el dron tenga suficiente batería para volver con seguridad.
Warning: If the pilot manually triggers a Return Home (from the App or the controller), or the drone automatically triggers a Return Home (due to signal loss for example), the drone does not follow terrain during the return. It instead returns in a straight line, at its current height or the predefined Return Height, whichever is higher.
- Una vez conforme con la misión, se recomienda descargar un mapa base sin conexión.
- Para guardar el plan de vuelo, toque Guardar plan de vuelo en la esquina superior derecha y proporcione un nombre para el plan de vuelo.
- Vuelva a la página de inicio y toque Planes de vuelo.
- Asegúrese de disponer de una buena conexión a Internet.
- Busque el plan de vuelo y toque Descargar.
- Una vez completada la descarga, abra el plan de vuelo y confirme que está usando el mapa base sin conexión. Para ello, toque el icono de mapa base en la parte inferior izquierda del área del mapa, active Sin conexión y busque el mapa base sin conexión que acaba de descargar.
- Asegúrese de que el mapa base sin conexión contenga la totalidad del área de la misión, así como la ubicación de despegue planificada. Es preciso que el dron despegue desde dentro de la cobertura de mapa base sin conexión para que pueda seguir el terreno de camino al área de la misión.
- Como alternativa, puede crear un mapa base sin conexión personalizado directamente en el menú de mapas base sin conexión. Mientras planifica la misión, toque el icono del mapa base en la parte inferior izquierda del área del mapa, Sin conexión y Crear. Proporcione un nombre para el mapa base sin conexión y seleccione Crear para iniciar la descarga. Al igual que con el otro procedimiento, compruebe que el mapa base sin conexión recién creado abarque toda el área, incluida la ubicación de despegue.
- Después de finalizar la configuración en el menú Configuración de la misión, toque VOLAR →.
- Dependiendo de los ajustes de configuración del vuelo, puede aparecer la pantalla Advertencias previas al vuelo. Se pueden mostrar diferentes avisos:
- Las Precauciones informan a los pilotos cuando el dron supera las alturas reglamentarias sobre el suelo o sobre el punto de despegue. El piloto puede modificar la altura a la que se presenta una Precaución en Configuración global > Configuración de vuelo > Altura de precaución. El vuelo se puede seguir realizando. El valor predeterminado es 400 pies.
- Las Advertencias informan a los pilotos cuando puede haber riesgo de colisión. Por ejemplo, si la Altura de retorno está establecida en un valor inferior al terreno más alto de toda el área de vuelo, se presenta una Advertencia. El vuelo se puede seguir realizando.
- Si aparece la pantalla Advertencias previas al vuelo, se recomienda encarecidamente tocar Cancelar y ajustar la configuración de vuelo para evitar el riesgo de colisión o que se superen las alturas reglamentarias.
- Dependiendo de los ajustes de configuración de vuelo, es posible que ArcGIS Flight no tenga los datos de terreno necesarios para calcular la altitud adecuada del dron en todos los puntos de la misión. La pantalla Errores previos al vuelo puede aparecer por varias razones:
- El área de vuelo está demasiado lejos de la ubicación actual del dron. Acerque el dron al área de vuelo.
- Es posible que la conexión a Internet no sea lo suficientemente fuerte para que ArcGIS Flight recupere los datos de terreno de un mapa base en línea. Descargue un mapa base sin conexión cuando disponga de una buena conexión a Internet, por ejemplo en la oficina.
- Es posible que el mapa base sin conexión no cubra la ubicación del despegue. La solución es situar el dron dentro del área de cobertura del mapa base sin conexión.
- Dependiendo de los ajustes de configuración del vuelo, puede aparecer la pantalla Advertencias previas al vuelo. Se pueden mostrar diferentes avisos:
- Lea la pantalla Instrucciones de seguridad. Para continuar, seleccione el cuadro de confirmación piloto y toque Continuar.
- Asegúrese de que el iPad esté conectado al dron. Busque por última vez cualquier obstáculo potencial por encima y sobre la ruta de vuelo hasta el área de la misión. Cuando esté listo, desde la pantalla Comprobaciones de la misión, deslice la barra verde hacia la derecha para iniciar el despegue.
- Utilice la vista en vuelo para monitorear el progreso de su misión y mantener la línea de visión visual con el dron. El progreso de la misión se indicará mediante la barra verde en la parte inferior de la pantalla.
- La pantalla Misión completa se mostrará cuando se hayan capturado todas las imágenes y el dron haya aterrizado. En la pantalla Misión completa, seleccione Hecho para volver a la pantalla de inicio del proyecto.
- Para obtener información sobre los métodos para importar las imágenes capturadas de su dron en ArcGIS Flight, consulte este artículo.
Id. de artículo: 000024335
Obtenga soporte con IA
Resuelva su problema rápidamente con el chatbot de inteligencia artificial de soporte de Esri.


Descubrir más sobre este tema
Search for related information
Find training related to this topic
Explore ideas and give feedback
Obtener ayuda de expertos en ArcGIS
Empieza a chatear ahora